面臨的挑戰(zhàn):
在戰(zhàn)場上����,地面車輛的機動性堪稱任務(wù)成功與否的分水嶺��。當(dāng)今的國防環(huán)境需要打造一種可快速部署��、高機動性的車輛平臺����,能夠在各種地形和道路類型之間可靠地操作���。近年來�,針對不同的環(huán)境條件和操作場景進(jìn)行性能評估的車輛仿真能力已大幅提升����。
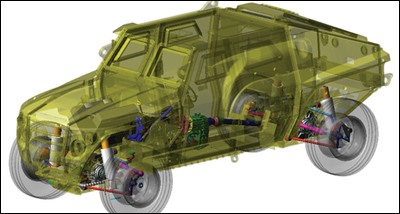
為了支持下一代北約參考機動性模型(NG-NRMM)項目,對現(xiàn)有 CAE 機動性分析能力進(jìn)行評估�����,使用了各種不同的?��?怂箍诞a(chǎn)品組合對 FED-Alpha(一種燃料效率示范車輛)的機動性進(jìn)行了評估和可視化(圖 1)�。為支持這項工作����,由 Eric Pesheck���、Venkatesan Jeganathan、Tony Bromwell�����、Aniruddh Matange 及Paspuleti Rahul Naidu 組成的團(tuán)隊依照現(xiàn)實世界的校準(zhǔn)數(shù)據(jù)創(chuàng)建并驗證了 Adams 模型�。然后采用這些經(jīng)過驗證的模型來準(zhǔn)確預(yù)測各種道路和越野操作場景下的車輛性能。通過專門開發(fā)的可視化和機動性映射應(yīng)用程序�����,將選自這些分析研究的結(jié)果集整合到 Luciad 中(?����?怂箍档乩砜臻g產(chǎn)品組合的一部分)�����。此外�,還證明了 Adams 模型的實時兼容能力����,可支持各種自主場景和“硬件在環(huán)”場景���。
來自海克斯康的解決方案:
創(chuàng)建并驗證 Adams 模型
Adams Car 是 Adams 產(chǎn)品組合中的垂直解決方案�,專攻車輛總成和子系統(tǒng)的建模和仿真,可用于創(chuàng)建 FED Alpha Adams Car 的整車模型(采用基于模板的方法建模)�;
可使用車輛數(shù)據(jù)填充可重復(fù)使用的子系統(tǒng)參數(shù)模板(例如底盤、輪胎�����、動力系等)��,并通過集成創(chuàng)建整車總成��,如圖 2 所示���。典型的模型數(shù)據(jù)包括設(shè)計重點�、零件質(zhì)量屬性以及部件兼容性特征�����。Adams Car 能對部件進(jìn)行詳細(xì)描述�����,例如柔韌性、摩擦力或者與頻率有關(guān)的行為(如有必要)����。
模型中所采用的逼真度和詳細(xì)程度取決于仿真意圖和可用的設(shè)計數(shù)據(jù)。對各種車輛測試事件中收集到的數(shù)據(jù)進(jìn)行對比�����,以驗證模型的準(zhǔn)確性����。通過對比與車輛行為、動力學(xué)及乘坐品質(zhì)有關(guān)的指標(biāo)對模型進(jìn)行驗證���。
用 Adams 模型預(yù)測車輛性能
隨后采用經(jīng)過驗證的 Adams 模型來仿真各種車輛事件�,用以評估車輛的性能和機動性���。這些事件包括模擬真實戰(zhàn)場場景的道路及越野行駛���。對典型的軍事道路評估事件進(jìn)行了仿真��,例如雙車道變道可展示極限操控性能、半圓形道路可展示乘坐品質(zhì)����、爬階梯可展示障礙物通行能力,這些仿真與測試結(jié)果非常吻合��。
由于在實現(xiàn)某些任務(wù)目標(biāo)時�,有可能需要在毫無準(zhǔn)備的地形上進(jìn)行操作,因此對越野性能的評估至關(guān)重要����。越野建模中最重要的一點就是地面力學(xué)的表述;土壤性質(zhì)以及輪胎與土壤表面之間的相互作用��。 本方案中采用了簡單模型和精細(xì)模型來描述地面力學(xué)�。
簡單地面力學(xué)模型采用基于實驗測量的經(jīng)驗關(guān)系來預(yù)測可變形地形對車輛操作的響應(yīng)。該方法計算效率高�,可依據(jù)定義明確的牽引和爬坡分析來評估車輛性能。而且該方法還能用于各種掃描過的地形形態(tài)����,以便進(jìn)行更廣泛的越野性能分析。
另外����,由于該方法計算效率高�����,能支持隨機分析方法���,在仿真時可以從統(tǒng)計的角度將因模型和地形輸入的變化而引起的不確定性考慮在內(nèi)。這些隨機仿真代表了數(shù)百種潛在的土壤特征��,能夠預(yù)測出整個土壤和地形屬性統(tǒng)計范圍內(nèi)的車輛性能���,進(jìn)而可得到車輛性能的置信區(qū)間����。
此外還采用了逼真度更高的方法����,根據(jù)仿真微粒的相互作用來得到土壤屬性。這通過 Adams 和 EDEM 的協(xié)同仿真來實現(xiàn)�,后者是 DEM 解決方案所提供的基于離散元方法(DEM)的仿真。在離散元方法中����,材料用一堆形狀簡單(通常以圓形和球形為基礎(chǔ))、相互作用的微粒表示���。Adams 和 EDEM 的典型協(xié)同仿真工作流如圖3所示�����。根據(jù)指定的車輛部件對潛在的 EDEM 接觸進(jìn)行定義�����。用Adams 確定這些零件的位移并提供給 EDEM���。然后由EDEM 確定產(chǎn)生的反作用力,并將其傳遞回 Adams���。
采用這些方法對拉桿牽引力和沙床加速度等測試進(jìn)行仿真��,以便測算 FED 在各種越野場景下的牽引行為���。雖然進(jìn)行了密集的計算,但這些仿真不僅表明逼真度有了顯著增加���,而且與測試結(jié)果的相關(guān)性也更為準(zhǔn)確�。
機動性映射
借助品種繁多的?����?怂箍诞a(chǎn)品組合(圖 5),運用地理空間業(yè)務(wù)部的 Luciad Lightspeed 技術(shù)將 Adams 預(yù)測的 FED Alpha 機動性特征投影到 Keewenaw 研究中心(KRC)的測試地形上�。將 Adams 預(yù)測與地理空間映射技術(shù)整合在一起,就可以基于各種土壤�����、等級以及預(yù)測的車輛性能數(shù)據(jù)的組合�,在整個映射范圍內(nèi)實現(xiàn)對車輛速度的可視化。此外��,還可以根據(jù)選定的路線端點來計算優(yōu)化路線�����。
可將邊坡預(yù)測����、障礙物信息等附加操作數(shù)據(jù)合并到上述框架中,由此建立起一個可運用仿真車輛性能數(shù)據(jù)對實際地形進(jìn)行全面機動性評估的平臺��。
實時虛擬模型性能
在驗證用于機動性評估的全逼真 Adams 模型對與其銜接的硬件在環(huán)(HIL)和 ADAS 應(yīng)用程序的適用性時�,需要為全逼真模型創(chuàng)建一個降階實時兼容變量。
由該變量可推導(dǎo)出不同逼真度、滿足特定仿真意圖的車輛動力學(xué)建模��,這樣用戶只需部署單一的建模解決方案�����,不必在各種工具之間進(jìn)行昂貴且易于出錯的模型轉(zhuǎn)換��。此外��,借助 Adams 實時方法�����,用戶可以更加自由地保留感興趣的模型特征�����。通?��?筛鶕?jù)分析和綜合要求對所選定的部件和連接的表述進(jìn)行一些簡化,從而得到實時車輛性能��。在本例中�����,僅對防側(cè)傾桿模型進(jìn)行了簡化。在 VTD(虛擬試駕)分析環(huán)境中對實時模型進(jìn)行測試以驗證其功能����。此外,還參照基準(zhǔn)整車性能對該模型的數(shù)值精度和效率進(jìn)行了評估�。
Adams 長期以來一直活躍在道路分析領(lǐng)域。這項工作展示了如何運用各種?����?怂箍诞a(chǎn)品組合來擴(kuò)展這些模型��,并將其重復(fù)用于道路地形表述�、實時分析以及操作映射背景下的越野分析。
客戶簡介:
北約
返回

 服務(wù)熱線
服務(wù)熱線

 全國免費服務(wù)熱線
全國免費服務(wù)熱線 電話:0512-6866-6680
電話:0512-6866-6680
 24小時服務(wù)電話:13328000586
24小時服務(wù)電話:13328000586
 傳真 :0512-6866-6680
傳真 :0512-6866-6680
 地址:蘇州市吳中區(qū)致能大道1號
地址:蘇州市吳中區(qū)致能大道1號